时间: 2024-01-27 16:11:37 | 作者: 兆瓦级风电变浆滑环
| 详情 |
|---|
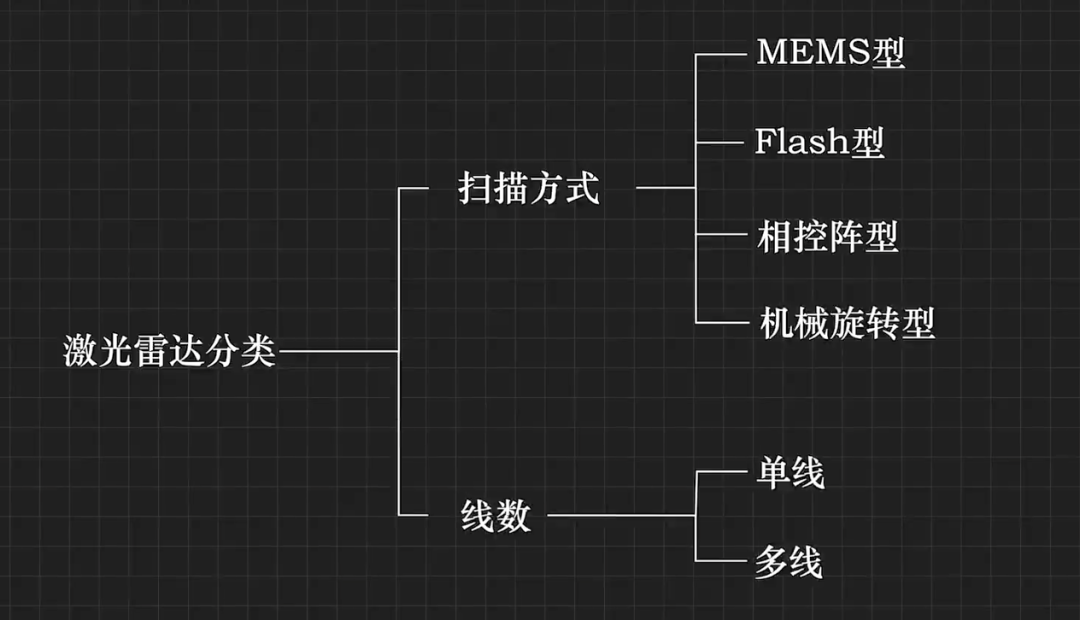
等领域。这种广泛的应用一方面得益于激光雷达的性能提升,一方面也得益于其成本的下降。 根据扫描方式,激光雷达可分为
话说回来,有没有可能自制一个激光雷达?B 站的一位硬核 UP 主「不想宅的技术宅」还真就把这个小目标实现了。
UP 主用了大半年的业余时间,用一个激光测距传感器整出了一个单线机械旋转式激光雷达,总共包括硬件设计、结构设计、FPGA开发和 3D 打印几个步骤。对于 UP 主来说,这不算是新的挑战,只能算是「把以前学过的东西复习了一遍」:
虽然 UP 主很谦虚,但很多人播放完视频之后,只能表示「不懂,但受到震撼」:
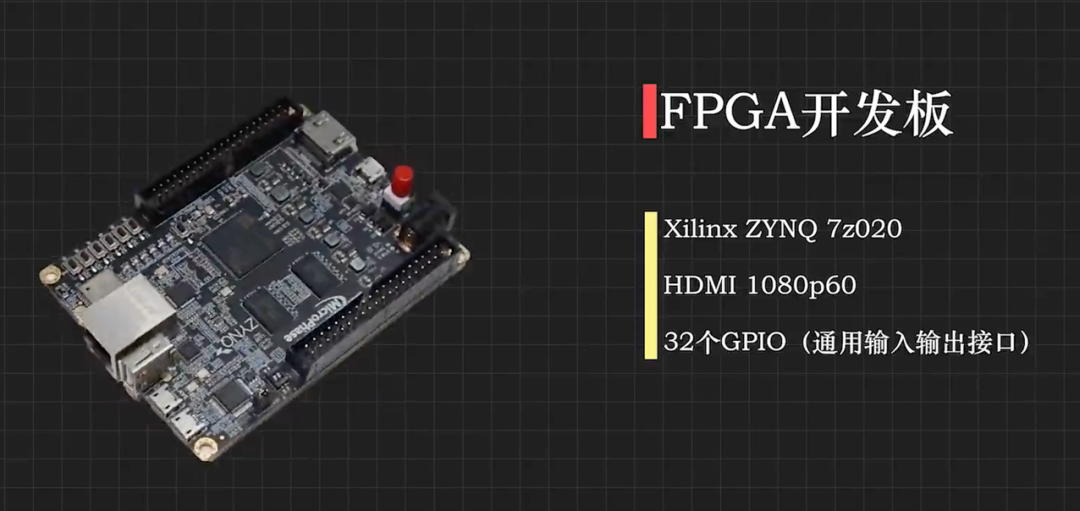
做一个激光雷达,要哪一些基本部件?UP 主选用了一款 FPGA 开发板,主芯片为 Xilinx ZYNQ7000,板上搭载了一个最高可输出 1080p60 帧视频的、32 个 GPIO(通用输入输出接口)等其他外设。在这块开发板上,将要完成雷达数据的采集、运算和显示。
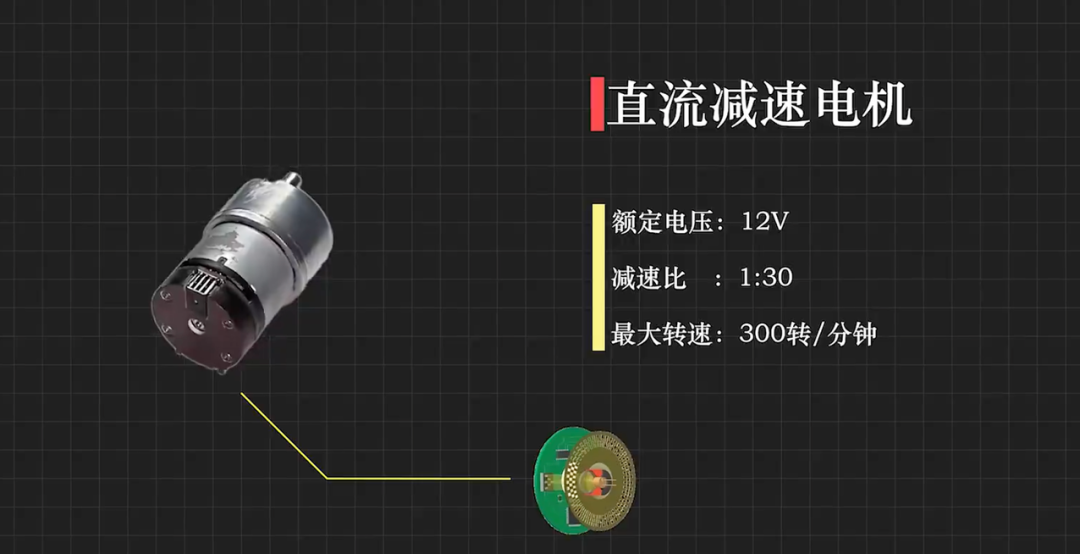
此外还有一个直流减速机,标称电压为 12V,减速比为 1:30,最大输出转速为 300 转每分钟,电机尾部安装了 500 线的,通过光电编码器可以获知输出轴的转动角度。
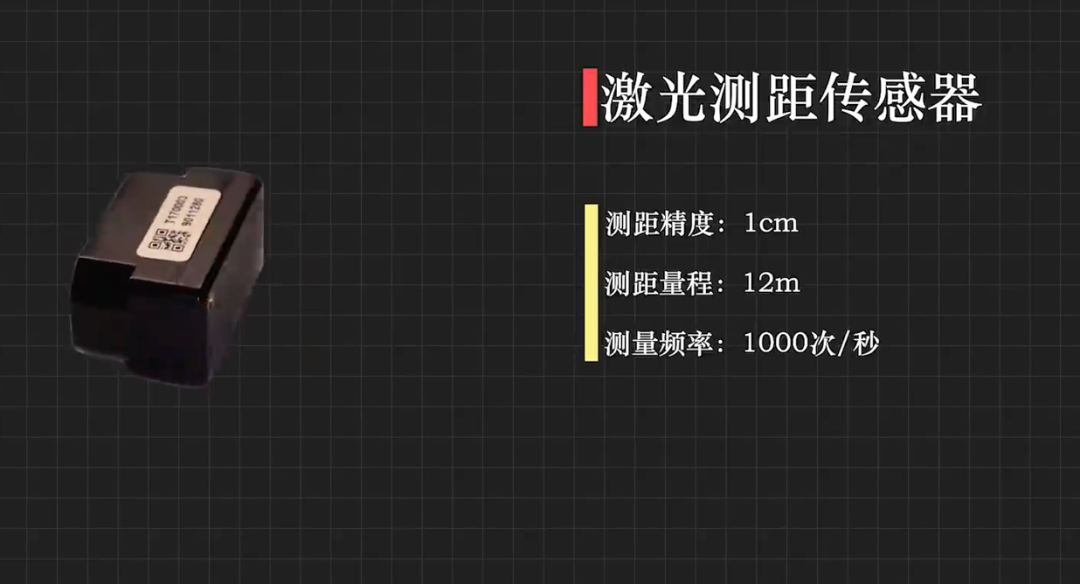
最后,还有一个激光测距传感器,测距精度为 1cm,量程为 12m,每秒钟可以测量 1000 次,输出接口为串口。
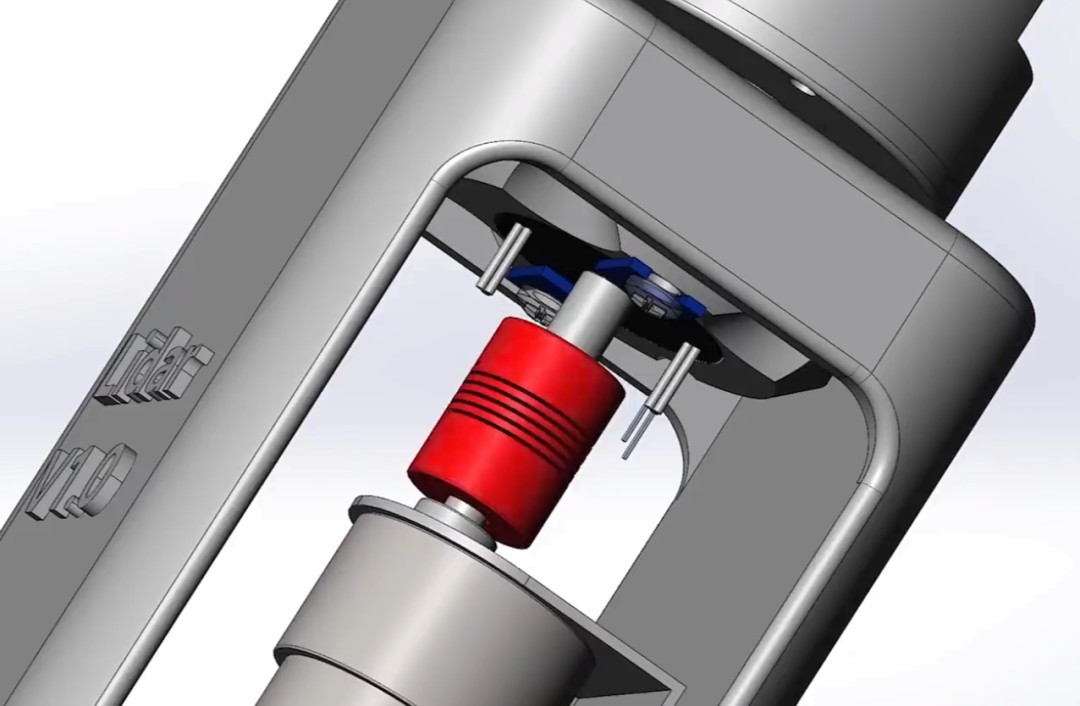
这些就是自制激光雷达所需要的基本部件,然后就是结构设计的问题了。结构设计UP 主表示,激光雷达在工作时,探头需要连续旋转,因此探头和底座的信号传输无法用导线连接,否则会引发缠绕问题,他通过导电滑环解决了这样的一个问题。导电滑环内部是一组电刷,能解决信号线在旋转情况下的缠绕问题:
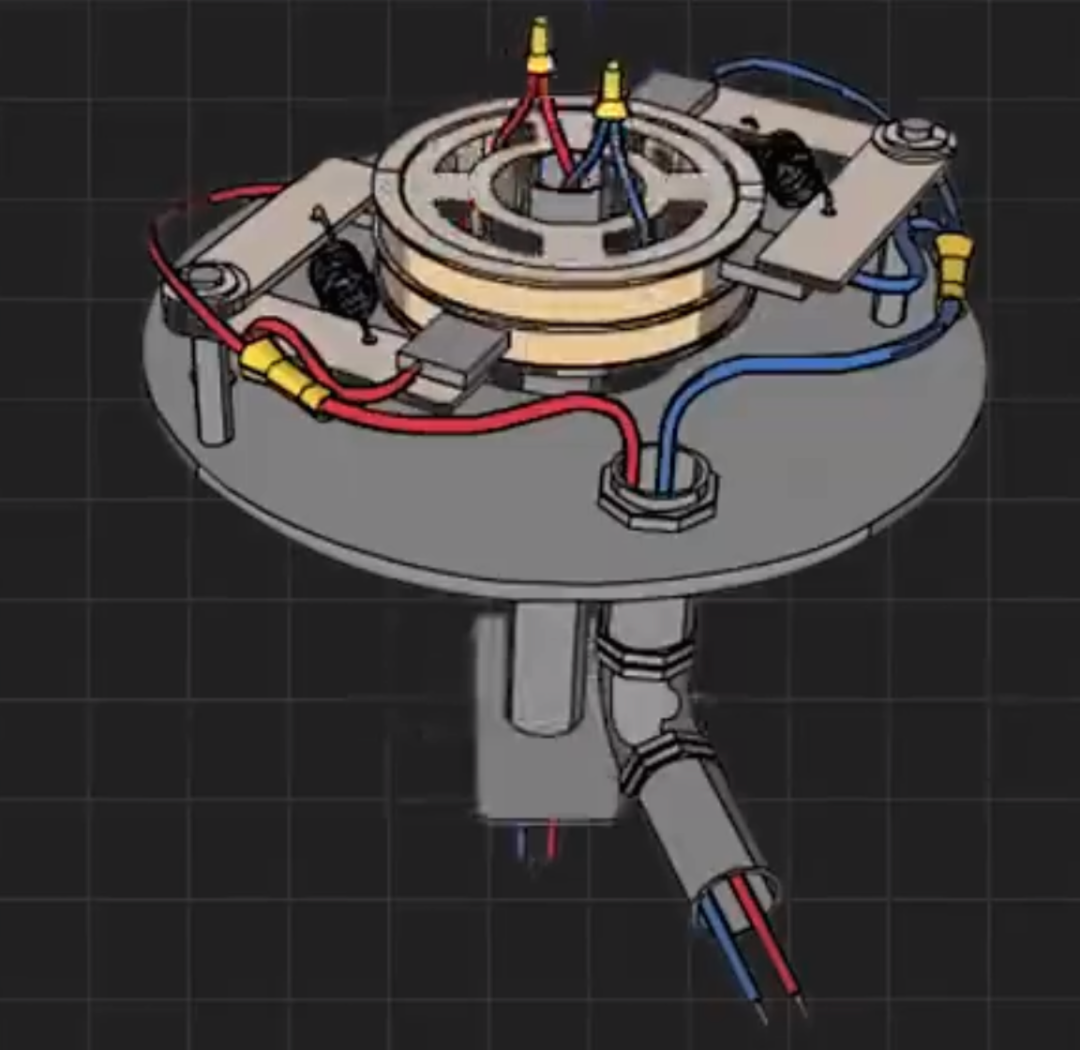
整个激光雷达分为底座和探头,探头和底座通过旋转轴进行连接,激光测距传感器通过螺丝固定在探头基座上。
探头基座内部还固定有转子PCB,底座部分固定有导电滑环、电机和定子 PCB。
在实际装配时,电机输出轴和导电滑环和旋转中心因为误差关系大概率不会处于同一轴心上,这里使用了一个弹性连轴器来补偿轴向偏差:
至此,结构设计就完成了。随后将设计好的结构件在 3D 打印软件中添加支撑,然后切片,最后通过 3D 打印机打印出来。打印好的探头基座、探头盖和底座就是这样:

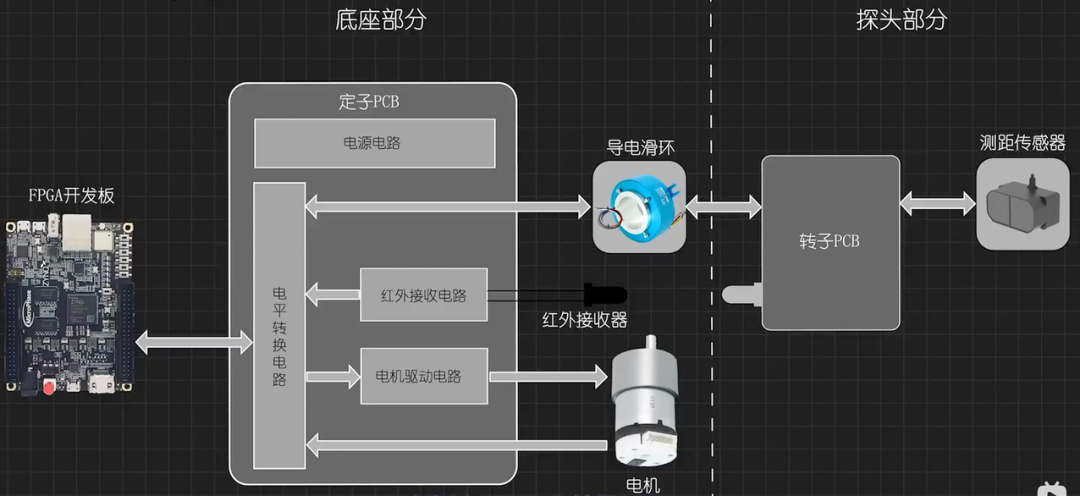
下图是整个电源以及隔离设计的框图,整个电机控制部分和其他电路没有实际的连接,电机在工作时不会干扰其他电路:
激光雷达和 FGPA 之间通过排线进行通信。在软件设计上,分为两部分:PS 侧的嵌入式开发,以及 PL 侧的 FPGA 开发,相比之下,PL 侧的开发显得很复杂。整体框图如下:
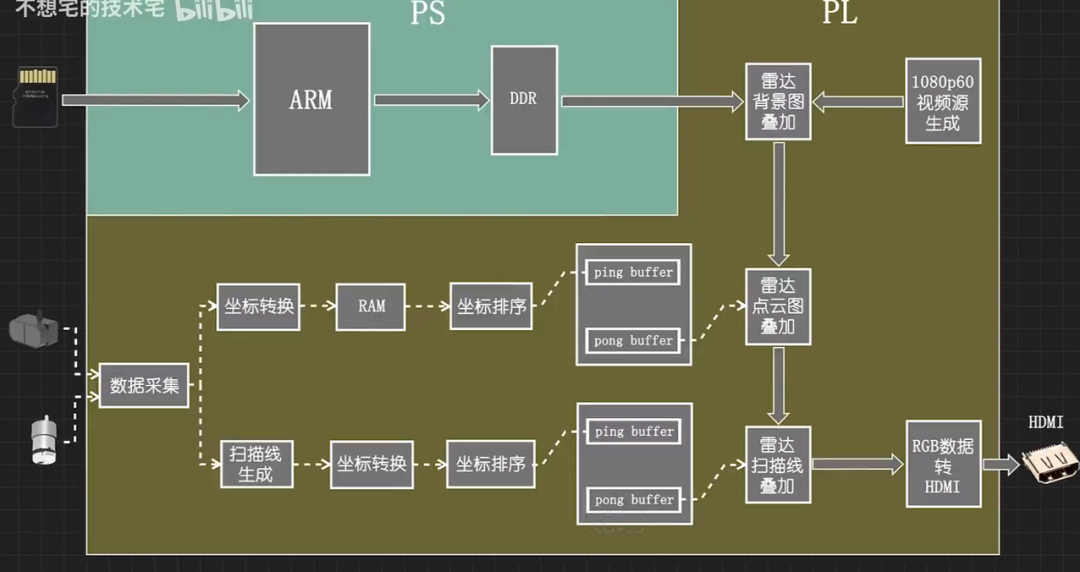
而主要的难度恰恰在于 FPGA 部分。UP 主表示:「要把雷达数据叠加在视频数据流上,费了我不少脑细胞。」最后,看下实际运行效果受限于激光测距传感器测量频率,探头转动一圈采集 500 个点的数据,所以激光雷达的扫描频率只能做到 2Hz 每秒。 为了视觉效果,UP 主加上了雷达扫描线,最终实现的效果还是可以的:
目前,UP 主已经把视频中激光雷达的结构和 pcb 设计文件上传到 Github 平台,想要做一个玩玩的小伙伴可以去下载。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-128
注重考虑的因素。 水下的冰山-日光抗击能力和深色物体检出率 除了上述测距距离、采样率、精度等大家都熟知的性能指标外,在
司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是
成名于2012年谷歌无人驾驶汽车的横空出世,当时头顶“大铁桶”的谷歌无人驾驶汽车在整个世界范围内引起轰动,“大铁桶”也
款高精度时间测量(TDC)电路,对比MS1002具有更高的精度和更小的封装,适合于高精度小封装的应用领域。MS1003具有
、视觉传感器三种。1.自适应巡航控制管理系统 Adaptive Cruise Control(ACC)自适应巡航控制系统是
凭借其越来越低的成本、有更好的分辨率和灵敏度,探测精度高,还可以全天候工作,不受白天和黑夜的光照条件的限制等特性,快速占领着汽车
、摄像头、毫米波、GPS、编码器和 IMU。这些传感器的数据输入到系统的感知算法里,对这个感知算法,我们会将这一些数据进行处理分析
通过扫描器单元形成光束角度偏转,光束与目标作用形成反射/散射的回波。当接收端工作时,可产生原路返回的回波信号光子到达
注重考虑的因素。 水下的冰山-日光抗击能力和深色物体检出率 除了上述测距距离、采样率、精度等大家都熟知的性能指标外,在
玩玩。。。。可以在设计的具体方案的时候发现角度信息很难解决。多以想看看大家有没有做过这方面的。帮忙想下。。。。如果哪位土豪家里有扫地机器人能拆下,,,,,给大家介绍下,,,哈哈哈。。。。哪位大神如果做过,,,能不能帮帮偶。。。`
最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。 其实更准确的
线束的增加,呈几何级数增长。所以产量非常低。价格自然就这么高了。“工业用品
重要内容就是进行背景抑制。利用原始强度像的均值信息进行距离像的背景抑制因为强度像受到噪声影响而效果不佳,改进算法加入了强度像的噪声滤除
上。另外,更大和功率更高的系统也正在开发中,它可以从在3万英尺高度飞行的飞机
作为当前工作区域组,适应复杂多变的应用环境,还可以输出点云数据。■镭神
代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
STM32 Cube MX学习笔记——TOF 高速单线. TOF 高速单线 Cube MX配置代码配置1. TOF 高速单线
新型探测器——近红外MPPC 然而,1550nm的人类视觉安全度更高,能够正常的使用单脉冲更大辐射能量的
`智能驾驶或无人驾驶车辆必然是车辆智能化的发展的新趋势,目前全国各地多个城市都有相关智能车辆测试甚至落地运营的新闻。目前智能(无人)驾驶车辆多采用了
(镭神智能LS01C)来实现避障功能的智能小车!不知从何下手,因为缺乏套多方面的知识,望高人指点,不甚感激!
度的国际消费类电子科技类产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态
度的国际消费类电子科技类产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态
度的国际消费类电子科技类产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态
司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是
度的国际消费类电子科技类产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态
直难以在嵌入式平台上实时运行。经纬恒润经过潜心研发,攻克了深度神经网络在嵌入式平台部署所面临的算子定制与加速、量化策略、模型压缩等难题,率先实现了高性能
检测神经网络并成功地在嵌入式平台(德州仪TI TDA4系列)上完成部署。系统功能目前该系统:•支持接入禾赛Pandar 40和
模块由光源和传感器组成,可实现120度FOV。遗憾的是120度的视场对于无人驾驶环境来说远远不足。要实现360度全方位FOV,
。关于数据的转化的理论,我们大家可以查阅相关文献。在此,只讲基本的构造和程序
SLAM可以在感知到障碍物的存在下避开障碍物,自主寻路和导航,实现智能移动。RPLIDAR A1 作为思岚科技第
到商业化,到如今广泛被市场认可,花了不到10年时间,而真正国内新能源汽车销量的爆发又集中在最近3年。成熟的无人驾驶方案离不开
除镜头外都有标准的量产元件能选择,门槛很低,成本也不高,未来可以取代传统的低像素摄像头。但与摄像头比,
可以获得极高的角度、距离和速度分辨率。距离和速度分辨率比较高,意味着可通过多谱勒成像技术来获得目标的清晰图像,这是
来确定物体的距离,能形成精度高达厘米级的3D环境地图,因此它在ADAS(先进驾驶辅助系统)及无人驾驶系统中起及其重要的作用。从当前车载
就是比较火的AR(增强现实 ),通过LIDAR能够测出这个现实中物体的大小尺寸,进而能够很好的3D建模,当然待开发的应用还有很多很多,毕竟相当于赋予了手机
; detection probabilities; false alarm rates
`这辆汽车对于科技爱好者绝不陌生,这就是谷歌研发的无人驾驶汽车。在行驶过程中,无人车
为主,毫米波和摄像头为辅,分为前融合和后融合。其中,后融合非常容易,而前融合的计算量非常大,
限制是不能提供物体颜色、文本的详情信息,所以不能理解道路标线、路沿、路标和交通灯等目标物颜色的细微差别,而这些工作都
后续处理,这样的一个过程中标定工作的挑战很大,还有延迟,同时不可避免要消耗计算资源。
季度后达到一百条以上的产线规模,速腾聚创的供货周期也能由目前的四周再次压缩。速腾CEO邱纯鑫表示,如果客户
不只为机器人(包括无人驾驶)而诞生,它还被大范围的应用于VR/AR、智慧交通、海洋探索和渔业资源监测
领域,Velodyne可谓是“一哥”级。它成立于1983年,2005年开始研发
2020 年,Apple 在新款 iPad Pro、iPhone 12 Pro 和 iPhone 12 Pro Max 上搭载 dToF
已被大范围的应用于机器人、无人驾驶、AR/VR、3D打印等多个领域,根据应用领域的不同,
、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通
机器人 、无人驾驶 、 轨道交通、 测绘作业…这些年随着这一些行业喷井式的爆发,
无论是车规难度,还是算法耦合、芯片自研,从投资的视角它们有一个共同的属性,即什么会形成
将会更少地遇到碰撞、泥水迸溅等意外影响,可以更为专注地为智己LS7探测前方障碍物信息。
作为光束扫描的实现方式,能轻松实现大角度扫描,但是装配困难、扫描频率低。
发射发光二极管、发射光学镜头、接收光学镜头、APD(雪崩光学二极管)、TIA(可变
的发射方式、数据采集、成像分辨率和应用场景等方面存在着很大的区别。 首先,单线
探测及测距系统的简称,目前大范围的应用在无人驾驶和扫地机器人等领域。这种广泛的应用一方面得益于
 粤公网安备 bob(中国)平台官网登录入口_bob线上平台官网
粤公网安备 bob(中国)平台官网登录入口_bob线上平台官网